
 ホームページ
ホームページ




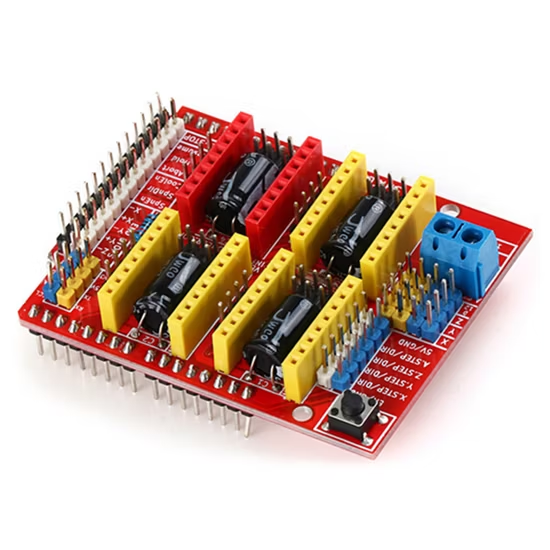
Ramps1.4 Reprap 用の熱い販売 3D プリンター CNC シールド V3 A4988 コントローラー
特徴: この拡張ボードはドライバー拡張ボードとして、彫刻機、3D プリンターに使用できます。 合計 4 つのスロットがあり、4 つの A4988 ステッピング モーターを駆動できます。 各ロードステッピングモーター
お問い合わせを送信してください説明
基本情報
| モデル番号。 | FUT6304 |
| HSコード | 85340090 |
| 生産能力 | 30000 個/年 |
製品説明
特徴: この拡張ボードはドライバー拡張ボードとして、彫刻機、3D プリンターに使用できます。 合計 4 つのスロットがあり、4 つの A4988 ステッピング モーターを駆動できます。 各ロード用ステッピング モーターに必要な IO ポートは 2 つだけです。 言い換えれば、6 つの IO ポートで 3 つのステッピング モーターを適切に管理できます。 とても使いやすいです。
egmodule IO ポート対応の紹介:
上図のIO対応図
r3拡張ボード
8 : EN (ステッピングモータードライバーイネーブル、アクティブロー)
7 : Z.DIR (Z軸方向制御)
6 : Y.DIR (Y軸方向制御)
5 : X.DIR (X軸方向制御)
4 : Z.STEP (Z軸ステッパー制御)
3 : Y.STEP (Y軸ステッパー制御)
2 : X.STEP (X軸ステッパー制御)
// 以下は簡単なステッピングモーター制御手順です。
# EN 8 を定義 // ステッピング モーター イネーブル、アクティブ ロー
# X_DIR 5 を定義 / / X 軸ステッピングモーターの方向制御
# Y_DIR 6 / / y軸ステッピングモーター方向制御を定義
# Z_DIR 7 を定義 / / Z 軸ステッピングモーターの方向制御
# X_STP 2 / / x 軸ステッパー制御を定義します
# Y_STP 3 / / y 軸ステッパー制御を定義
# Z_STP 4 / / z 軸ステッパー制御を定義
/ *
// 関数: ステップ . 機能: ステッピングモーターの方向、ステップ数を制御します。
// パラメータ: dir 方向制御、dirPin 対応ステッピング モーター DIR ピン、stepperPin 対応ステッピング モーター "step" ピン、戻り値なしのステップのステップ番号。
* /
void ステップ (ブール dir、バイト dirPin、バイト stepperPin、int ステップ)
{
デジタル書き込み (dirPin, dir);
遅延(50);
for (int i = 0; i
デジタル書き込み (ステッパーピン、HIGH);
遅延マイクロ秒 (800);
デジタル書き込み (ステッパーピン、LOW);
遅延マイクロ秒 (800);
}
}
void setup () {// IO ピンで使用されるステッピング モーターは出力に設定されます
ピンモード (X_DIR、出力); ピンモード (X_STP、出力);
ピンモード (Y_DIR、出力); ピンモード (Y_STP、出力);
ピンモード (Z_DIR、出力); ピンモード (Z_STP、出力);
ピンモード (EN、出力);
デジタル書き込み (EN、LOW);
}
void ループ () {
ステップ (false、X_DIR、X_STP、200); //X軸モーター逆1リング、200ステップは円です。
ステップ (偽、Y_DIR、Y_STP、200); / / y 軸モーター逆 1 リング、200 ステップは円です。
ステップ (偽、Z_DIR、Z_STP、200); //z軸モーター逆1リング、200ステップは円です。
遅延 (1000);
ステップ (true、X_DIR、X_STP、200); //X軸モーター前進1周、200ステップが一周します。
ステップ (true、Y_DIR、Y_STP、200); / / y軸モーター前進1周、200ステップが一周します。
ステップ (true、Z_DIR、Z_STP、200); / / z軸モーター前進1周、200ステップが一周します。
遅延 (1000);
}
注: A4988 モジュールを挿入するときは、逆に挿入しないように注意してください。 ステッピングモーターの配線は次のようになります。
2A、2Bはグループ(赤、緑)、1A、1Bはグループ(青、黄)で、方向を変えたい場合は、一方のグループの位置を変更できます。たとえば、2A、2Bを相互に交換します。



